
形状重构能力可赋予机器人丰富多样的运动模式,极大提升机器人的环境适应能力。当前,这类机器人主要通过两种方式来实现形态改变:一是采用舵机等机械结构精确重构;二是依靠智能材料制成、兼具变形和锁定能力的变刚度驱动器。对于研究人员而言,减小电机尺寸与质量并实现其复杂变形能力颇具挑战。现有驱动器在小尺度(如<5cm)下,难以同时实现连续的形状变化与构型锁定,也难以达成同源且解耦的变形与锁定控制,严重制约了多模式机器人向微型化与无线化发展。
近日,清华大学航天航空学院、柔性电子技术国家级重点实验室(柔电国重)张一慧教授课题组采用材料与结构协同设计的策略,提出了一种具有连续形状变化和构型锁定能力的薄膜形电热响应驱动器的设计概念。与其他具有变形及锁定能力的驱动器相比,该类驱动器具有最小的尺寸以及最大的弯曲变形角度。在此基础上,课题组研制了具有复杂变形模式的薄膜单胞和块体单胞,进而构建起一套“搭积木”式的设计方法,可用于制备具有复杂形状重构能力的驱动器(如“变形金刚”等)(图1)。
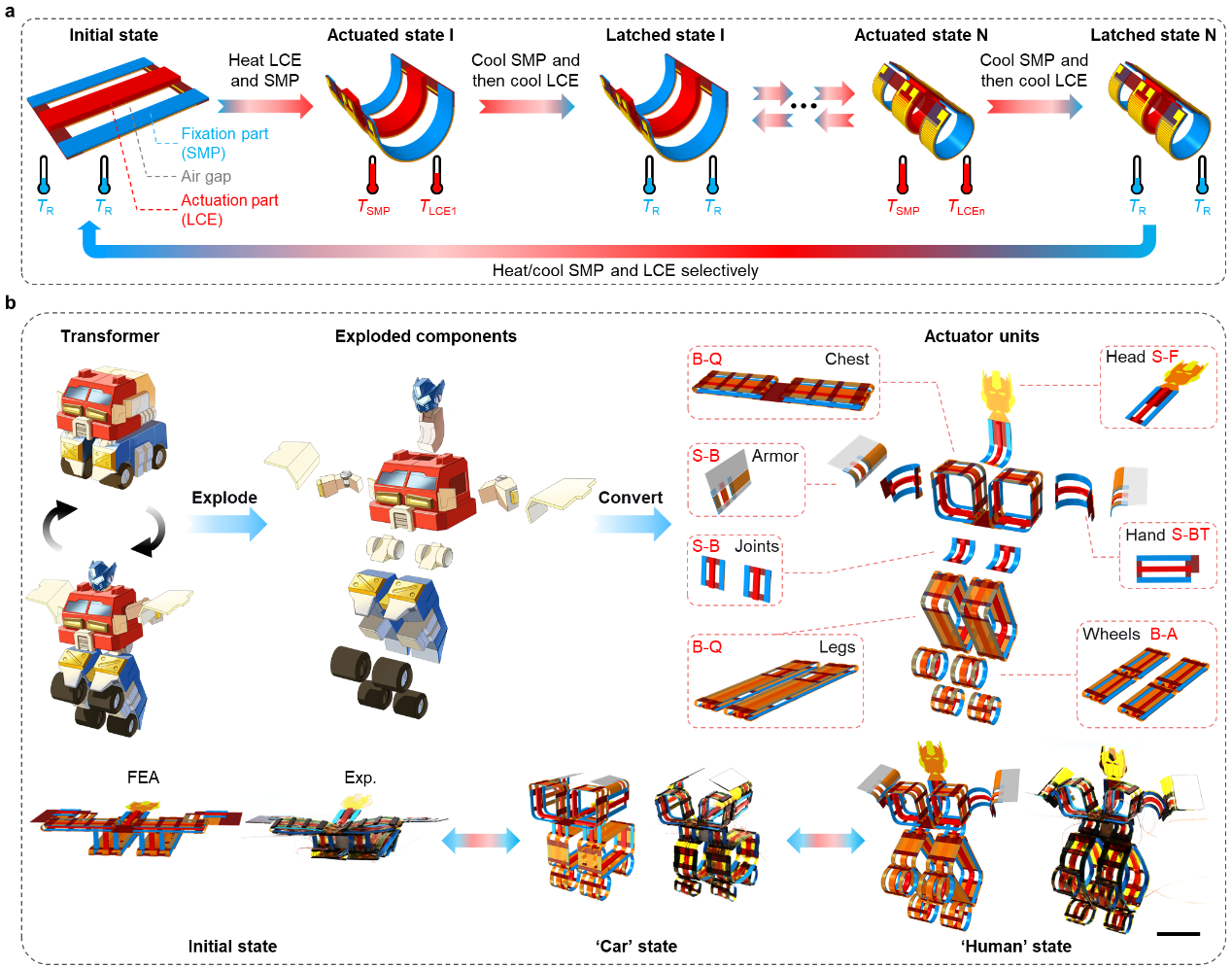
图1.具有连续变形和锁定能力的小尺度驱动器。(a)为驱动器的变形和锁定示意图;(b)为基于“搭积木”设计策略的“变形金刚”驱动器。(比例尺:10mm)
该驱动器具备优异的变形和锁定能力以及较强的承载特性,可作为可重构外骨骼,用以集成传感器、电机等功能元器件,进而构建复杂的机器人系统(图2)。基于此,课题组设计制备了具有复杂变形重构能力的三维显示器件、可在多种构型(如“跑车”“飞车”和“货车”)间切换的多功能微型轮式机器人,以及世界上最小、最轻的微型无线陆空两栖机器人(体长9cm;质量25g;其地面运动速度为每秒18.2个身长)。
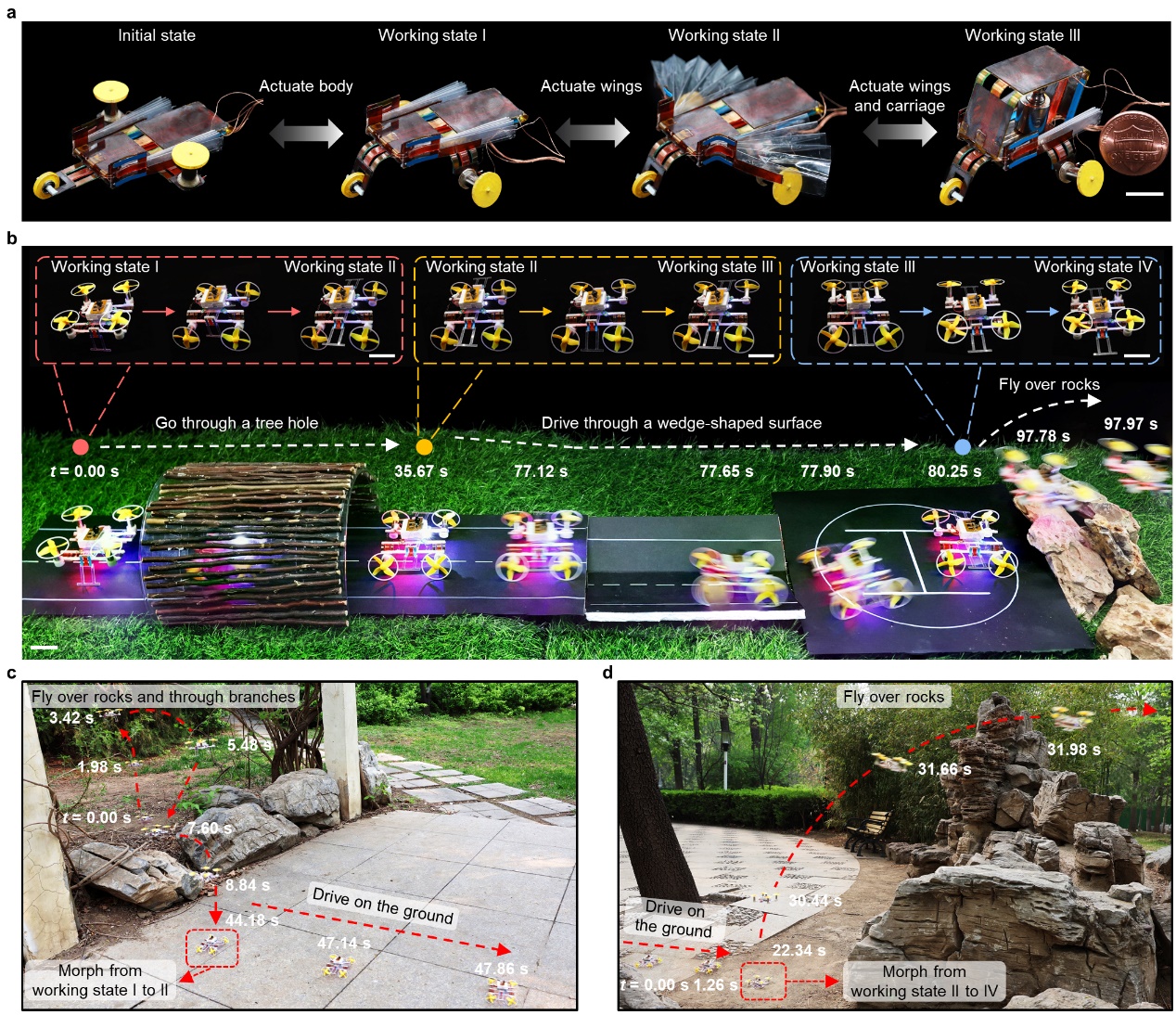
图2.基于该驱动器的可重构系统。(a)为多功能微型轮式机器人;(b)为微型陆空两栖机器人;(c)-(d)为微型陆空两栖机器人的户外运动场景展示。(比例尺:(a)10mm、(b)30mm)
4月18日,相关研究成果以“具有连续三维变形和锁定能力的可重构机器”(Transforming machines capable of continuous 3D shape morphing and locking)为题,在线发表于《自然·机器智能》(Nature Machine Intelligence)。
清华大学航天航空学院、柔性电子技术国家级重点实验室(柔电国重)教授张一慧为论文通讯作者,航天航空学院2020级博士生徐世威为论文第一作者。论文作者还包括清华大学航天航空学院2021级博士生胡笑男、2024级博士生臧传奇、2023级博士生羊佑舟、2022级博士生赖禹辰、2018级博士生邬军,航天航空学院博士后杨若曦、肖越、刘文博、庞文博、刘卿,柔电国重副研究员柏韧恒,以及清华大学机械工程系副教授赵慧婵、北京航空航天大学教授文力、北京航空航天大学博士生田博丞和李磊。研究得到国家自然科学基金委、科学探索奖、清华大学国强研究院等的资助。
论文链接:
https://www.nature.com/articles/s42256-025-01028-4
供稿:航院
编辑:李华山
审核:郭玲
© 版权声明
本文由分享者转载或发布,内容仅供学习和交流,版权归原文作者所有。如有侵权,请留言联系更正或删除。
相关文章

暂无评论...